| IEA EBC Annex 60 |
|
| IEA EBC Annex 60 |
|
Package with motor models for valves and dampers
Extends from Modelica.Icons.VariantsPackage (Icon for package containing variants).
| Name | Description |
|---|---|
| Ideal motor model with hysteresis | |
| Collection of models that illustrate model use and test models |
 Annex60.Fluid.Actuators.Motors.IdealMotor
Annex60.Fluid.Actuators.Motors.IdealMotor
Ideal motor model with hysteresis
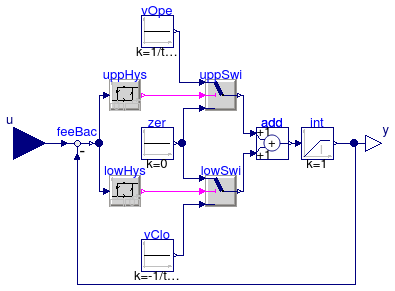
Ideal actuator motor model with hysteresis and finite actuation speed.
If the current actuator position y is below (or above) the
input signal u by an amount bigger than the hysteresis
delta, then the position y is increased (decreased)
until it reaches u.
The output y is bounded between 0 and 1.
Note: This model can introduce state events which increase the computation time.
For a more efficient implementation that approximates a motor, set in
the valve or damper model the parameter filteredOpening=true
instead of using this motor model.
See also
Annex60.Fluid.Actuators.UsersGuide.
Extends from Modelica.Blocks.Interfaces.SISO (Single Input Single Output continuous control block).
| Type | Name | Default | Description |
|---|---|---|---|
| Real | delta | 0.05 | Hysteresis |
| Time | tOpe | 120 | Opening time [s] |
| Time | tClo | tOpe | Closing time [s] |
| Real | y_start | 0.5 | Start position |
| Type | Name | Description |
|---|---|---|
| input RealInput | u | Connector of Real input signal |
| output RealOutput | y | Connector of Real output signal |